
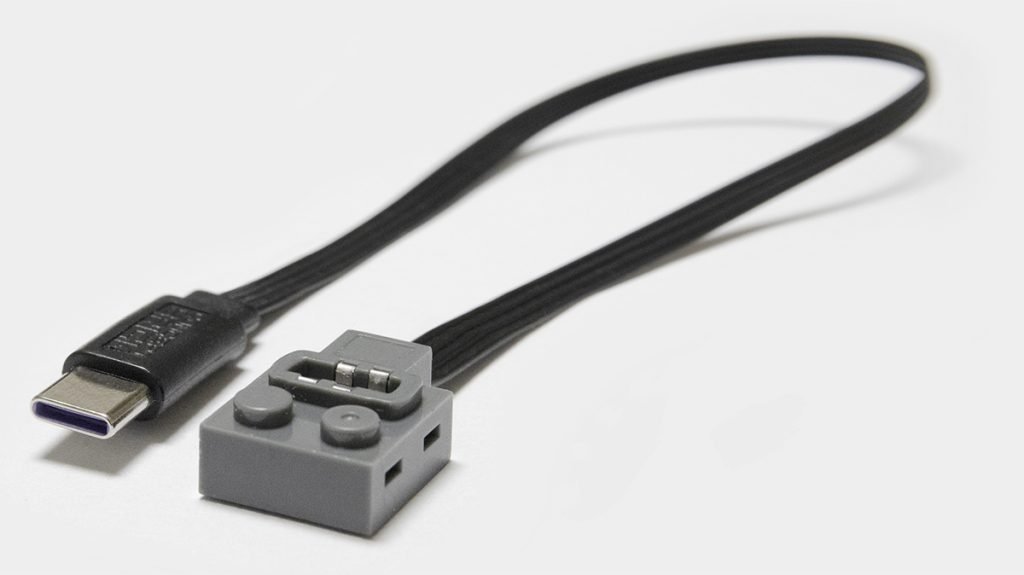
The first prototype of our TypeC to LEGO Power Functions adapter looked almost too simple.
TypeC input. Power conversion. Power Functions output. Motor spins.
At that stage, it was easy to think the project was basically finished.
It was not.
The real problems only appeared after we stopped testing one motor on the table and started testing actual Technic MOCs.
That is where things became more interesting.
A motor with no load is not a serious test. It can hide many problems. The current draw is low, the startup load is light, and the power source does not have to work very hard.
A real Technic build is different.
A drivetrain has friction. A gearbox has resistance. A crane has load. A crawler can stall. A GBC module keeps running for a long time. A large MOC may start two or three motors at once.
That is when the USB power source starts to matter.
The first issue we noticed was startup current.
Power Functions motors can draw a much higher current at startup than they do while running normally. This is especially obvious with XL motors, loaded drivetrains, or mechanisms that start from a stopped position.
On paper, the average current might look fine.
In real use, the short startup spike can cause some USB chargers or power banks to react badly.
We saw a few different behaviors:
• the power bank shut off
• the charger restarted output
• the motor pulsed once and stopped
• the voltage dipped briefly
• the model behaved differently with another USB cable
At first, it was tempting to blame the prototype circuit.
Sometimes the circuit did need changes. But not always.
A big part of the problem was that USB power sources are not all the same. A charger designed for a phone may behave differently from a laptop charger. A power bank may have low-current sleep behavior. Some fast chargers are strict with protection limits. Some cables add enough resistance to make the problem worse under load.
This was probably the biggest lesson from testing:
TypeC is standard as a connector, but the real-world behavior of USB power sources is not always identical.
For a LEGO Technic builder, that difference should not become their problem.
So our adapter had to be more tolerant.
Another issue showed up when testing PF servo motors.
A regular motor can hide small power issues. It might slow down slightly, but still keep moving. A servo is less forgiving. If the power is unstable, the servo may twitch, center poorly, or behave inconsistently when another motor starts.
That was actually useful during development.
The servo became one of our favorite test parts because it exposed problems quickly.
If the adapter could handle a drive motor and servo together without strange behavior, we had more confidence in the design.
We also tested longer runtime.
This part is boring, but important.
A five-minute test does not tell you much about heat, connector stress, or stability over time. Some problems only appear after the adapter has been running for a while. GBC-style builds are especially good for this because they create repeated small load changes again and again.
During these tests, we became less interested in peak numbers and more interested in stable behavior.
It is easy to write a big output number on a product page. It is harder to make the adapter behave well across many chargers, power banks, motors, cables, and MOC designs.
For this product, stable 9V output mattered more than chasing the highest possible power claim.
We also learned that some mechanical problems look like electrical problems.
If a Technic drivetrain is binding, no power adapter can magically fix it. If a gear train is overloaded, the motor will still struggle. If a model is too heavy for the selected motor, the adapter is not the real issue.
So part of testing was learning where to stop blaming the electronics.
A good adapter should provide clean power. It should not hide bad mechanical design by forcing more voltage into the system.
That is why we stayed focused on regulated 9V output.
The purpose is to make Power Functions more consistent, not to abuse the motors.
After several rounds of testing, the final design became much more practical than the first prototype. Not because it was visually complicated, but because many small details were adjusted around real Technic use.
Startup behavior.
Voltage stability.
Cable strain.
Heat.
Charger compatibility.
Servo response.
Long runtime.
Those are not exciting marketing words, but they are the things that matter when a builder actually plugs the adapter into a model.
Looking back, the adapter was not difficult because Power Functions is complicated.
It was difficult because real builders use parts in messy, unpredictable, creative ways.
That is exactly why we had to test it like a builder, not only like an electronics project.
LEGO® and Power Functions are trademarks of the LEGO Group. This adapter is an independent compatible accessory and is not sponsored, authorized, or endorsed by the LEGO Group.